Physical AI refers to the next generation of artificial intelligence systems that move beyond digital interfaces to perceive, reason, and act within the physical world. Unlike traditional AI, which is confined to virtual environments (processing text or images for human consumption), Physical AI is “embodied”—it bridges the gap between digital “bits” and physical “atoms.” In 2026, this field has become the cornerstone of Agentic AI integration, where machines no longer just suggest actions but execute them autonomously across complex environments.
What is Physical AI? (Definition & Scope)
At its core, Physical AI is the intelligence that enables machines to understand the laws of physics, spatial relationships, and real-time causality. While traditional robotics relied on rigid, pre-programmed instructions, Physical AI utilizes foundation models—such as Vision-Language-Action (VLA) models—to adapt to unpredictable real-world scenarios.
The Evolution from Digital to Embodied AI
The transition to Physical AI marks the end of the “Chatbot Era” and the beginning of the “Action Era.” According to research from the Center for Security and Emerging Technology (CSET), this convergence of AI and robotics is as transformative as the introduction of the smartphone. It shifts the paradigm from task-specific automation to generalizable physical reasoning.
Core Components of Physical AI Systems
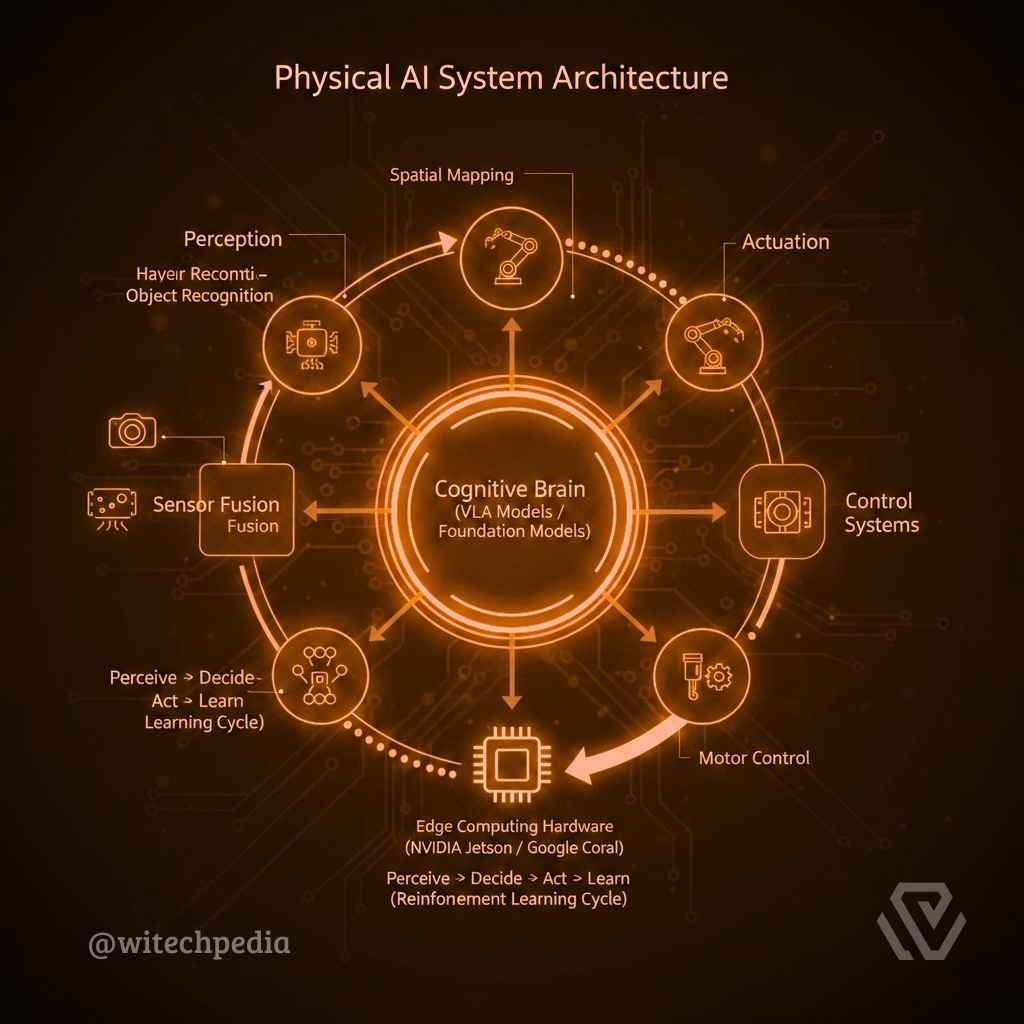
To function in the real world, a Physical AI system requires a tightly coupled architecture often referred to as the “Perceive-Decide-Act-Govern” loop.
Sensory Perception & Spatial Intelligence
Physical AI depends on multimodal sensor inputs to build a high-fidelity “World Model.”
The Cognitive “Brain” & VLA Models
The “Brain” of Physical AI consists of Vision-Language-Action (VLA) models. These models allow a robot to receive a command in natural language (e.g., “Sort these fragile items”), perceive the items through vision, and translate that intent into precise motor control (Action).
Actuation & Edge Computing
Because real-world actions require millisecond-level precision, Physical AI often runs on Edge Computing hardware. High-performance AI chips, such as the NVIDIA DGX or specialized analog AI chips from IBM Research, allow for local processing, reducing the latency that could lead to physical accidents.
Key Applications of Physical AI in 2026
The global market for Physical AI is projected to reach $1 trillion by 2030, driven by its expansion across critical industries.
Technical Challenges: The Sim-to-Real Gap
One of the primary hurdles in Physical AI development is the “Sim-to-Real” gap. While an AI can be trained millions of times in a physics-based simulation (like NVIDIA Isaac Sim), the real world contains “noise”—friction, gravity fluctuations, and wear-and-tear—that is difficult to simulate perfectly.

Ethics, Safety, & Governance
In Physical AI, the stakes are higher; a “hallucination” in the physical world can result in property damage or injury.
Frequently Asked Questions (FAQ)
How is Physical AI different from a standard robot?
A standard robot follows pre-set scripts (e.g., “move arm to X, Y, Z”). Physical AI perceives a changing environment and decides how to move based on its understanding of the world.
What are some examples of Physical AI today?
Tesla’s Optimus humanoid, Amazon’s Proteus warehouse robots, and autonomous drone delivery fleets are all primary examples of Physical AI in action.
Is Physical AI related to AGI?
Many researchers, including those at MIT News, believe that true Artificial General Intelligence (AGI) cannot be achieved without embodiment, as intelligence requires interacting with the physical world to understand causality.
For more deep dives into the technology of tomorrow, visit the WiTechPedia AI & ML Wiki.