The chatbot era is ending. The age of physical AI has arrived — and it is rewriting what artificial intelligence actually means.
- What Is Physical AI?
- Physical AI vs. Generative AI: What’s the Difference?
- How Physical AI Works: The Full Technical Stack
- NVIDIA’s Physical AI Platform: Isaac, Cosmos, and GR00T Explained
- Key Players in the Physical AI Ecosystem
- Physical AI Use Cases: Where It’s Already Working
- The Role of Simulation: Why “Sim-to-Real” Is Everything
- Challenges and Limitations of Physical AI
- Frequently Asked Questions
- The Road Ahead: What Physical AI Looks Like in 5 Years
- The Bottom Line: Physical AI Is the Next Computing Platform
For the past four years, AI progress was measured in tokens, benchmarks, and increasingly convincing conversations. But in 2025 and into 2026, a seismic shift is underway. The most consequential AI systems are no longer the ones that write emails or generate images. They are the ones that pick up packages in a warehouse at 3 a.m., assist surgeons in operating theaters, and navigate construction sites without a single line of remote-control code.
Physical AI — the discipline of building machines that perceive, reason, and act autonomously in the real world — is the next frontier of intelligent systems. NVIDIA’s Jensen Huang called it the “big bang” of a new technological era, with more than $20 billion invested in humanoid robots in the last two years alone. And he was being conservative.
This guide covers everything: what physical AI is, how it works under the hood, which companies are leading it, and what it means for every industry on earth.
What Is Physical AI?
Physical AI refers to artificial intelligence systems that are embedded in physical machines — robots, vehicles, drones, and industrial equipment — enabling them to perceive their environment through sensors, reason about it using AI models, and take real-world actions autonomously.
It is the convergence of several powerful fields:
- Robotics — mechanical systems capable of motion and manipulation
- Computer vision — the ability to see and interpret the physical world
- Large language models (LLMs) and vision-language models (VLMs) — enabling natural language understanding and contextual reasoning
- Reinforcement learning — training robots through simulation and real-world trial
- Edge computing — running AI inference directly on the robot, with low latency
The distinction from earlier robotics is fundamental. Traditional industrial robots follow rigid, pre-programmed scripts. A physical AI system, by contrast, generalizes. It can encounter a situation it has never seen before and figure out what to do — the same way a human worker would.
In plain terms: Physical AI is the bridge between digital intelligence and the physical universe.
Physical AI vs. Generative AI: What’s the Difference?
Most people know generative AI — the technology behind ChatGPT, DALL-E, and Claude. Physical AI is a different beast entirely. Here’s how they compare:
| Feature | Generative AI | Physical AI |
|---|---|---|
| Primary output | Text, images, audio, code | Physical actions, motion, manipulation |
| Environment | Digital / virtual | Real-world, unstructured |
| Sensing | Text or image prompts | Cameras, LiDAR, tactile sensors, IMUs |
| Key challenge | Hallucination, reasoning depth | Perception accuracy, real-time control, safety |
| Training data | Internet-scale text/images | Robot teleoperation, simulation, synthetic data |
| Latency requirements | Seconds acceptable | Milliseconds required |
| Flagship examples | GPT-4, Claude, Gemini | NVIDIA GR00T N1.6, π0 (Physical Intelligence), Boston Dynamics Spot |
| Market size (2026 est.) | ~$200B | ~$80B (industrial robotics alone by 2030) |
The two fields are not competitors — they are converging. The most advanced physical AI systems today use LLMs and VLMs as their reasoning “brain,” then connect that brain to motors, grippers, and sensors. NVIDIA’s GR00T N1.6, for instance, is a Vision-Language-Action (VLA) model: it sees, understands natural language instructions, and translates that directly into full-body robot motion.
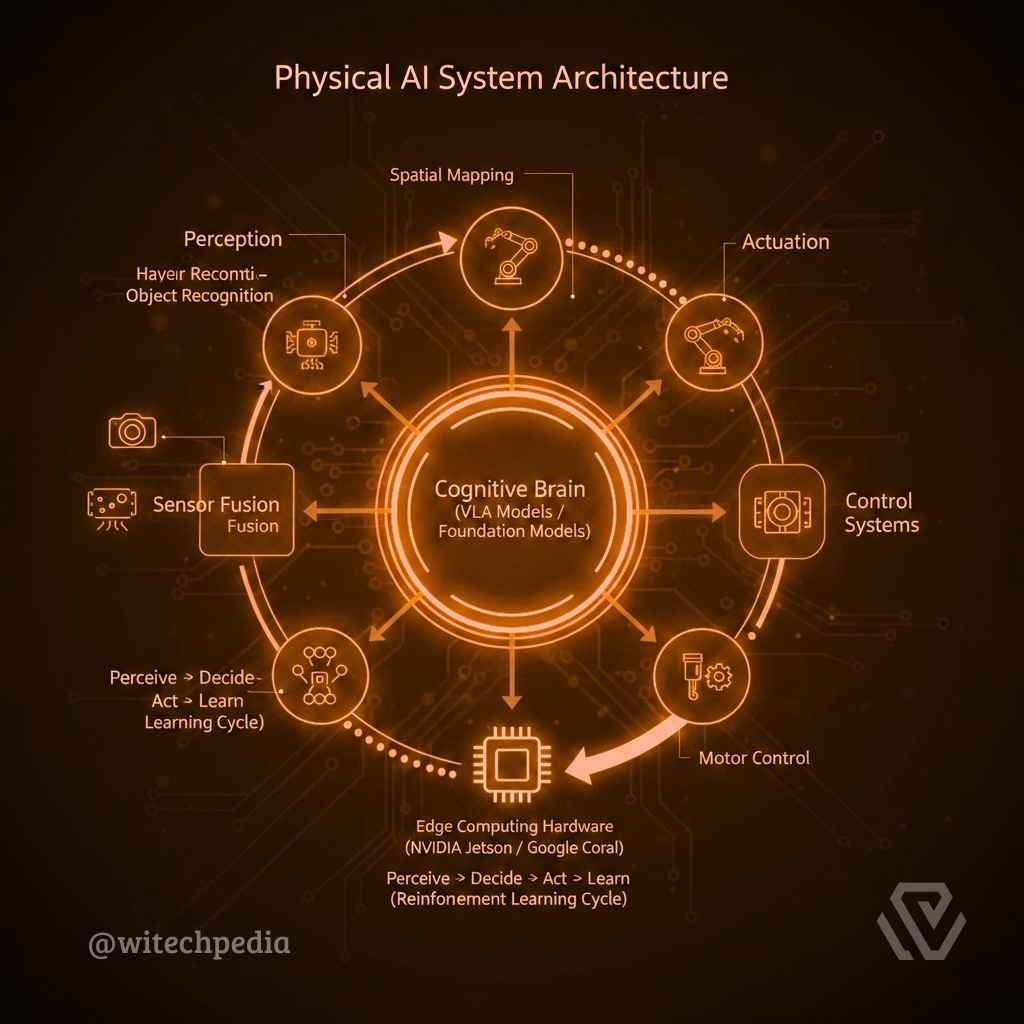
How Physical AI Works: The Full Technical Stack
Understanding physical AI requires understanding its layered architecture. There are five core layers:
1. Perception Layer
Robots need to understand their environment before they can act in it. Physical AI systems use a combination of:
- RGB cameras — for visual scene understanding
- Depth sensors / LiDAR — for 3D spatial mapping
- Tactile sensors — for grasping and object manipulation
- IMUs (Inertial Measurement Units) — for orientation and motion tracking
- Microphones — for audio cues and voice commands
Modern computer vision models, including convolutional neural networks (CNNs) and vision transformers (ViTs), process this sensory data in real time.
2. Reasoning Layer
This is where large language models and vision-language models enter. Once a robot perceives its environment, it needs to reason about what to do. VLMs allow robots to interpret natural language commands (“Pick up the red box and place it on the left shelf”) and match them against visual observations.
NVIDIA’s Cosmos Reason 2 is a purpose-built reasoning VLM for physical AI — it enables machines to see, understand, and act like humans in open-ended environments.
3. Planning Layer
After reasoning, the system must plan a sequence of actions. This involves trajectory planning, collision avoidance, and task decomposition. Modern systems use both classical motion planning algorithms and learned neural planners trained in simulation.
4. Control Layer
The plan becomes motion. Low-level controllers translate high-level actions (“move arm to position X”) into precise motor commands. This requires solving inverse kinematics, dynamics modeling, and real-time feedback control.
5. Simulation & Training Infrastructure
Before a physical AI model can act in the real world, it must train in simulation — millions of times, across thousands of virtual environments. This is where platforms like NVIDIA Isaac Sim and NVIDIA Omniverse are transformative. Synthetic data generated by world models like NVIDIA Cosmos allows robots to learn in physics-accurate virtual factories before ever touching real equipment.
NVIDIA’s Physical AI Platform: Isaac, Cosmos, and GR00T Explained
No company has invested more comprehensively in physical AI infrastructure than NVIDIA. Their stack is the closest thing the industry has to a unified platform.
NVIDIA Isaac
Isaac is NVIDIA’s end-to-end robotics development platform. It includes:
- Isaac Sim — a physics-accurate simulation environment built on NVIDIA Omniverse, where robots train in virtual copies of real factories and warehouses
- Isaac Lab — a reinforcement learning framework enabling large-scale robot skill training on NVIDIA DGX infrastructure
- Isaac Lab-Arena — the latest release, simplifying complex task creation and parallel environment evaluation
- Isaac for Healthcare — a specialized deployment for surgical robots and hospital automation
At GTC 2026, NVIDIA announced Isaac Lab 3.0 in early access, enabling dramatically faster, large-scale robot learning. Partners like ABB Robotics, FANUC, KUKA, Universal Robots, and YASKAWA are all building on Isaac.
NVIDIA Cosmos
Cosmos is NVIDIA’s family of world foundation models — AI systems that generate physically accurate synthetic video of robots interacting with environments. They serve two purposes: generating training data and evaluating robot policies in simulation before real-world deployment.
Key Cosmos models include:
- Cosmos Transfer 2.5 / Predict 2.5 — open, fully customizable world models for physically based synthetic data generation
- Cosmos Reason 2 — an open reasoning VLM that enables intelligent machines to understand and act in the physical world
- Cosmos 3 — announced at GTC March 2026, the first world foundation model to unify synthetic world generation, vision reasoning, and action simulation in a single architecture
The NVIDIA Physical AI Dataset has surpassed 15 million downloads on Hugging Face, reflecting the scale of industry adoption.
NVIDIA Isaac GR00T
GR00T (Generalist Robot 00 Technology) is NVIDIA’s flagship foundation model specifically for humanoid robots. The latest iteration, GR00T N1.6, is an open reasoning Vision-Language-Action (VLA) model that:
- Unlocks full-body control for humanoid robots
- Uses Cosmos Reason 2 for contextual understanding
- Enables robots to understand natural language instructions and perform complex, multistep tasks
- Supports partners including Franka Robotics, NEURA Robotics, and Humanoid
GR00T was first revealed in March 2025 as a humanoid foundation model and simulation suite. In just over a year, it has become the de facto starting point for teams building next-generation humanoid robots.
Key Players in the Physical AI Ecosystem
Physical AI is not a one-company story. A rich ecosystem of hardware makers, AI labs, and startup pioneers is defining the field.
Established Technology Leaders
| Company | Role | Key Physical AI Product |
|---|---|---|
| NVIDIA | AI infrastructure | Isaac, Cosmos, GR00T N1.6 |
| Boston Dynamics | Humanoid/quadruped robots | Spot, Atlas |
| ABB Robotics | Industrial automation | AI-enhanced collaborative robots |
| FANUC | Factory automation | AI vision + robot controllers |
| KUKA | Industrial robots | Intelligent robot cells |
| Universal Robots | Collaborative robots (cobots) | AI-guided UR-series arms |
Physical AI Startups to Watch
| Startup | Funding | What They’re Building |
|---|---|---|
| Physical Intelligence (π) | $1B+ at $5.6B valuation | General-purpose robot brain (π0 model) |
| Figure AI | $675M | Humanoid robots for manufacturing |
| Agility Robotics | $150M | Digit humanoid for logistics |
| Skild AI | Undisclosed | Generalized robot brains on Cosmos |
| FieldAI | Undisclosed | Robots for unstructured field environments |
| World Labs | $230M | Generative world models for robot validation |
Physical Intelligence (π) deserves a specific mention. The company — backed by Jeff Bezos, OpenAI, and Thrive Capital — raised $400 million at a $2.4 billion valuation in 2024, then added another $600 million in 2025. Their π0 model is one of the most advanced general-purpose robot foundation models in existence, designed to control any robotic form factor through a single pre-trained system.
Physical AI Use Cases: Where It’s Already Working
Physical AI is not a future technology. It is operating right now, at scale, in the following environments:
Manufacturing & Assembly
NVIDIA and its ecosystem partners are deploying physical AI in electronics manufacturing plants, where robots must perform high-precision assembly tasks that previously required human hands. Caterpillar and YASKAWA are using NVIDIA-powered physical AI for autonomous construction deployment and factory automation respectively.
Healthcare & Surgery
Surgical physical AI is moving fast. LEM Surgical uses NVIDIA Isaac for Healthcare and Cosmos Transfer to train its Dynamis surgical robot, powered by NVIDIA Jetson AGX Thor. PeritasAI is integrating physical AI into real operating environments using Isaac for Healthcare and the Rheo blueprint, developing multi-agent surgical intelligence that can coordinate, sense, and act in sterile environments in real time.
Logistics & Warehousing
Agility Robotics’ Digit humanoid is working in Amazon fulfillment centers, handling the repetitive task of moving totes. Physical AI allows these systems to adapt to different box sizes, weights, and placements — something rigid, scripted robots cannot do.
Autonomous Vehicles

The autonomous vehicle stack is arguably the most mature physical AI deployment in existence. Companies like Waymo are running robotaxi fleets at scale, relying on the same perception-reasoning-action loop that defines physical AI in robotics.
Agriculture
Startups are deploying physical AI in greenhouses and open fields — robots that can identify ripe produce, navigate uneven terrain, and harvest crops with minimal human supervision.
The Role of Simulation: Why “Sim-to-Real” Is Everything
One of the hardest problems in physical AI is the sim-to-real gap — the difference between how a robot behaves in a virtual training environment versus how it behaves in the messy, unpredictable real world.
Solving this gap is what NVIDIA Cosmos is specifically designed to address. By generating physically accurate synthetic video of robots in various environments, Cosmos allows training data to scale without requiring millions of hours of real-world robot operation. Isaac Sim runs physics simulations that are accurate enough for trained policies to transfer directly to real hardware.
The results are striking. Skild AI and FieldAI are using Cosmos for data generation and Isaac for policy validation, enabling their robots to master new tasks with minimal retraining. World Labs uses Isaac Sim to validate its generative world models before any physical deployment.
This “digital twin” approach — train in simulation, validate digitally, deploy physically — is becoming the standard workflow for serious physical AI development.
Challenges and Limitations of Physical AI
No technology is without friction. Physical AI faces several real and serious challenges:
Safety and Reliability
A robot that makes a wrong prediction can cause physical harm. Unlike a chatbot that produces a wrong answer, a physical AI error might mean a surgical tool in the wrong place or a warehouse robot colliding with a human worker. Safety engineering in physical AI is orders of magnitude more stringent than in software AI.
The Data Problem
Training language models requires internet-scale text. Training physical AI requires real or simulated robot interaction data — and that data is far harder to collect. This is why synthetic data generation (NVIDIA Cosmos) and teleoperation datasets are so critical to the field’s progress.
Generalization
Today’s best physical AI systems still struggle to generalize across wildly different environments. A robot trained to pack boxes in one warehouse may fail in a warehouse with different shelves, lighting, or floor materials. Generalist models like π0 and GR00T N1.6 are specifically trying to solve this problem, but it remains an open research challenge.
Cost and Infrastructure
High-end physical AI systems are expensive. The compute required for training (NVIDIA DGX clusters), the hardware cost of advanced humanoid robots (often $50,000–$200,000+), and the engineering effort to deploy them safely at scale puts physical AI currently out of reach for small organizations.
Latency and Edge Compute
Real-time robot control demands sub-millisecond inference. This pushes AI computation to the edge — directly onto the robot — which requires highly efficient hardware like NVIDIA’s Jetson T4000 module (offering 4x greater energy efficiency than its predecessor).
Frequently Asked Questions
What is physical AI in simple terms?
Physical AI is artificial intelligence built into physical machines — like robots and autonomous vehicles — that allows them to perceive their surroundings, understand situations, and take real-world actions without being manually programmed for every task. Instead of answering questions on a screen, physical AI acts in the world.
How is physical AI different from traditional robotics?
Traditional robots follow rigid, pre-programmed scripts. They can only perform the exact task they were explicitly programmed for, in exactly the conditions anticipated. Physical AI robots, by contrast, use machine learning models to generalize — they can adapt to novel situations, interpret natural language instructions, and improve over time through experience or additional training.
What is NVIDIA’s role in physical AI?
NVIDIA has built what is arguably the most comprehensive physical AI development platform in the industry. Their stack — Isaac Sim for simulation, Cosmos for world modeling and synthetic data generation, and GR00T N1.6 as a humanoid foundation model — gives robotics companies the tools to develop, train, and deploy intelligent robots without building every component from scratch. More than 110 robotics companies are building on NVIDIA’s physical AI infrastructure.
Is physical AI the same as embodied AI?
The terms are closely related and often used interchangeably. “Embodied AI” is the academic and research term, emphasizing the philosophical concept that intelligence must be grounded in a physical body to truly understand the world. “Physical AI” is the industry-preferred term, emphasizing real-world deployment and commercialization. In practice, they refer to the same paradigm: intelligence that acts in physical space.
What industries will physical AI disrupt first?
Based on current investment patterns and deployment activity, the first industries to be meaningfully disrupted by physical AI are: (1) warehouse logistics and e-commerce fulfillment, (2) manufacturing and precision assembly, (3) surgical and clinical healthcare, (4) autonomous transportation, and (5) agricultural harvesting. Each of these sectors involves repetitive, physical tasks in semi-structured environments — the exact conditions where today’s physical AI systems perform best.
How much has been invested in physical AI?
NVIDIA’s Jensen Huang cited over $20 billion invested specifically in humanoid robots as of early 2026. Zooming out to the full physical AI market, industrial robotics alone is projected to reach $80 billion by 2030. Physical Intelligence has raised over $1 billion. Figure AI raised $675 million. The space is attracting some of the largest venture capital rounds in technology history.
What is a Vision-Language-Action (VLA) model?
A Vision-Language-Action (VLA) model is a type of foundation model designed for physical AI systems. It combines three capabilities: (1) vision — seeing and interpreting the physical environment through cameras and sensors; (2) language — understanding natural language instructions from humans; and (3) action — translating vision and language understanding directly into physical actions, such as moving a robot arm to pick up an object. NVIDIA’s GR00T N1.6 is a leading example of a VLA model purpose-built for humanoid robots.
The Road Ahead: What Physical AI Looks Like in 5 Years
The trajectory is clear. Physical AI is moving from proof-of-concept deployments in controlled environments to general-purpose systems operating at scale across complex, real-world settings.
Several milestones mark the path forward:
Near-term (2026–2027): Humanoid robots enter commercial production in automotive plants and large fulfillment centers. Surgical physical AI gains regulatory clearance in multiple jurisdictions. The cost of capable physical AI platforms drops significantly as hardware scales.
Medium-term (2028–2030): Physical AI systems become cost-competitive with human labor for a defined set of industrial tasks. Generalist robot models approach human-level dexterity and adaptability in structured environments. The industrial robotics market surpasses $80 billion.
Longer-term (2030+): Physical AI enters the home — assisting elderly populations, managing household tasks, and operating in environments that have never been engineered for robots. At this stage, the distinction between “robots” and “intelligent machines” becomes essentially meaningless.
The infrastructure being built today — NVIDIA Isaac, Cosmos, GR00T; the Physical Intelligence π0 model; the simulation-to-reality pipelines emerging from a hundred well-funded startups — is the foundation on which that future will be built.
The Bottom Line: Physical AI Is the Next Computing Platform
Physical AI is not just the next wave of robotics. It is the next computing platform — the shift from intelligence on screens to intelligence embedded in the world around us. The companies, engineers, and researchers who understand it earliest will have an extraordinary advantage.
Stay ahead of every development in physical AI, robotics, and machine learning at WiTechPedia.com.